
Robotic arm joints require high concentricity, controlled runout, and stable bearing seats. The main machining difficulties are thin-walled sections, tolerance stack-up in multiple bores, and consistent surface finish for sliding or rotating elements.
DEK applies multi-axis machining and jig-based clamping to minimize deformation. Our process planning ensures coaxiality and dimensional repeatability through sequential boring and precision honing. Mirror surface finishing and anodizing improve wear resistance.
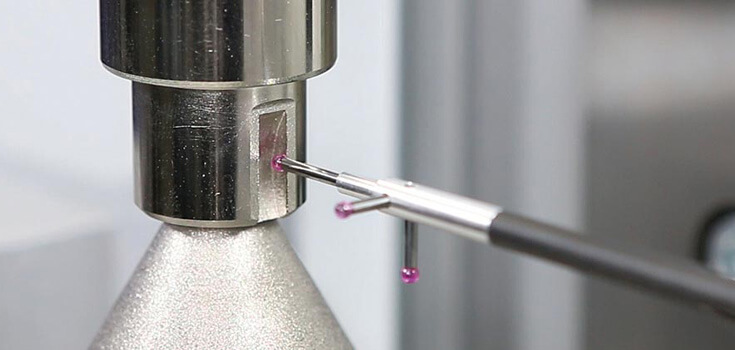
All critical dimensions are verified using CMM, roundness tester, and surface profilometer. Our engineers optimize tool paths and cutting parameters to achieve tight tolerance across both prototype and production runs.

Thin-walled robotic joints often deform under clamping. We use custom soft jaws and multi-step boring with reaming to maintain wall thickness consistency. Tolerance is controlled within ±0.01mm.
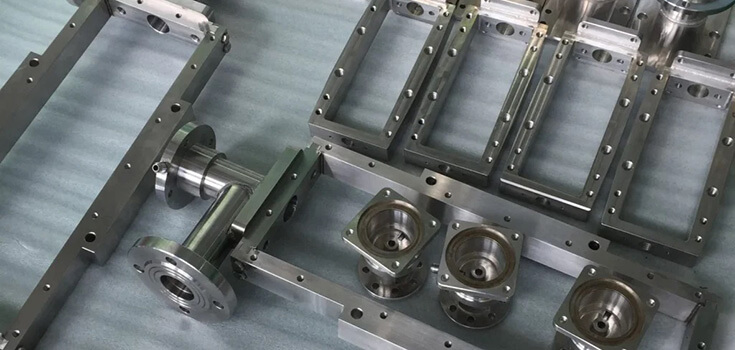
Robotic joints require multiple bores with strict coaxiality. DEK applies one-set-up 5-axis machining combined with precision honing to achieve runout less than 0.01mm, ensuring smooth bearing and shaft fit.

To extend service life, we perform hard anodizing or heat treatment followed by cylindrical grinding. Surface hardness reaches up to 60 HRC, while maintaining bore size accuracy.













Precisión, rapidez y cero defectos: los ingenieros mecánicos confían en DEK cuando el fallo no es una opción.
Send us your drawing—we’ll provide fast DFM feedback and a precise quote, no minimum order.